Ball Acceleration & Deceleration in RCJ Soccer Simulation
In the RoboCup Soccer Simulation World, ball acceleration and deceleration are two topics that the TFA Junior Robotics Team looked into. Ball acceleration and deceleration can affect the entire ball prediction algorithm. Without an accurate ball prediction strategy, one risks going to the wrong predicted position and losing or not winning control of the ball.
The TFA Junior Robotics Team hypothesizes that the deceleration is affected by the mass and the force that the ball enters the wall. Under review, one can find that the ball does not always come back from the wall in the same direction. This was found by determining what happens at the collision by doing a close inspection of the ball and the location that it lands. The TFA Junior Robotics Team hypothesises that ball will slow down by half, with a +- 0.001 offset for both the x and y values. This is not exact, but is an approximation of the exact acceleration/deceleration of the ball.
While going on a straight path, the ball will not slow down, unless acted upon by an external force. Once the ball touches the wall, some of its speed will slow, however the second timestep determines the actual change. Therefore, it is very challenging in implementing a change in between two timesteps. Therefore, this prediction will not be 100% accurate.
Why does the ball doesn’t come back in a straight path?
The TFA Junior Robotics Team has also found that the ball does not come at a straight path after colliding with a wall. The team has considered the possibility that the wall is in fact not flat, and therefore, the ball prediction is not possible. Another possibility is that the ball rotation plays a factor, where the ball is rotating when hitting the wall. This causes the ball to spin at unforeseen angles. This is something that the TFA Junior Robotics team is actively trying to figure out.
Newton’s First Law in action
As seen in this above video, the ball collides with a robot. This results in the ball gaining momentum from the collision and moving forward at a constant velocity. As seen in the above video, the ball continues on at a constant speed and separates from the chasing robot.
Unlike the ball in the field, this ball will not stop, as it is in an inertial field of motion. This proves that the Webots world maintains Newton’s First Law of Motion, and that there is no air resistance or friction in the world.

Ball deceleration/acceleration analysis
The TFA Junior Robotics Team found out about the Ball Acceleration and Deceleration topic when the team compared the predicted point of the ball and the actual point in the world. The team wrote the predicted data into files, and using data visualization, quickly graphed the predicted vs actual data. This resulted in a graph of the large discrepancy between the actual and the predicted point. Therefore, the team chose to investigate this problem further.
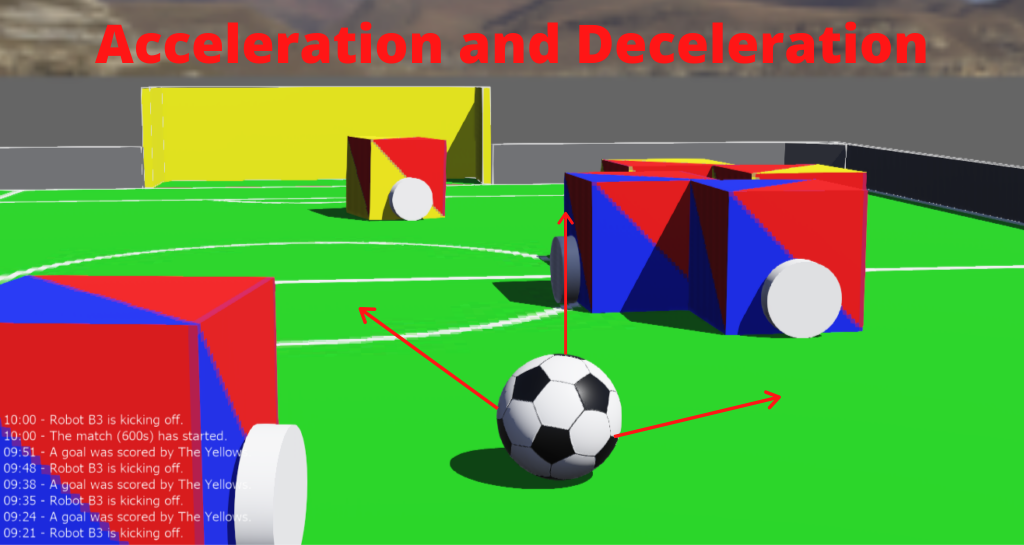
Ball running inside the field
As seen in the above video, the ball continues to go forward unless acted on by an external force. This is correct according to Newton’s First Law of motion. Once the ball hits the wall, there is no longer an inertial frame of reference, where the ball is acted on a force by the wall. This causes the ball to lose it’s velocity, and therefore, slow down. Energy is likely transferred, and momentum from the collision results in a change in resulting velocity. Ultimately, due to the diminishing speed of the ball, the simulator supervisor calls Lack of Progress, and the ball is relocated to the centre.
Conclusion:
After studying the Webots world, the TFA Robotics Team concludes that there is no acceleration or deceleration of motion without an external force acting on the ball. This proves that the Webots world has no air resistance or friction. However, when inside the soccer field, the wall acts as a force when collided on with, and results in the ball slowing down.