Test Mapping without Running a Robot
Mapping is an important feature in the RoboCup Junior Rescue Maze League. It can help the team to earn more points by searching areas where the robot has not been to before. Additionally, with mapping, the robot can return to its starting tile and earn the Successful Exit Bonus.
In order to improve our mapping algorithm for the 2020 RCJ Rescue Simulation Demonstration Competition, we decided to test our mapping algorithm without running a robot. This could greatly reduce the waiting time in the simulation, especially with large maps.
We first created a matrix that represents the map we want to test. Then, we mark the start tile, holes and/or obstacles’ x and y position in the matrix. Next, we input the information of the tile that the “robot” is on to our mapping algorithm. Finally, we print the map the “robot” remembers each time after the “robot” moved to the next tile.
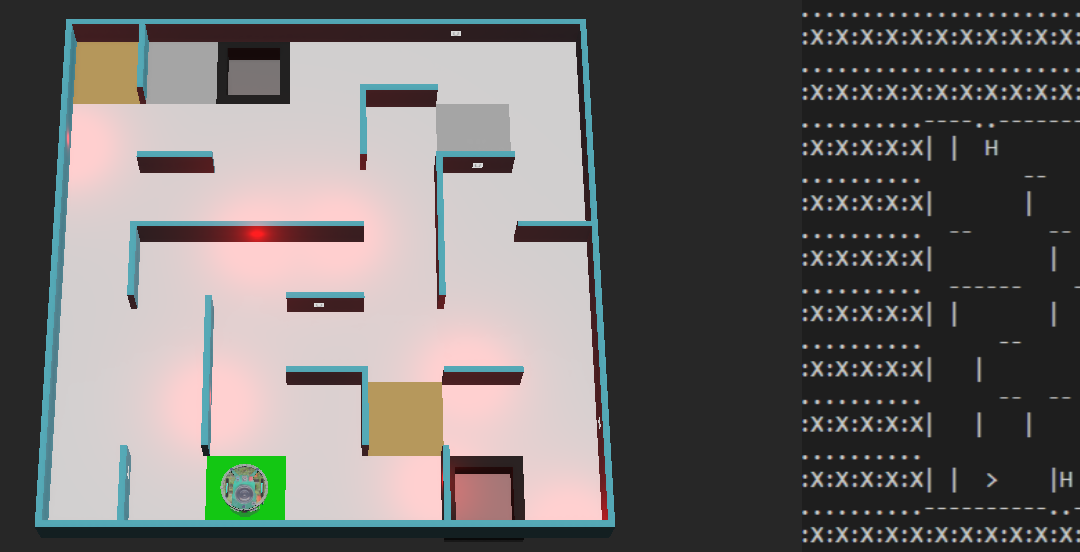
Below are three images of what the “robot” printed while searching through the maze. In this example, ‘^/>/v/<‘ represents the “robot”, ‘O’ represents unvisited tiles, ‘X’ represents unknown tiles, and ‘H’ represents holes.




