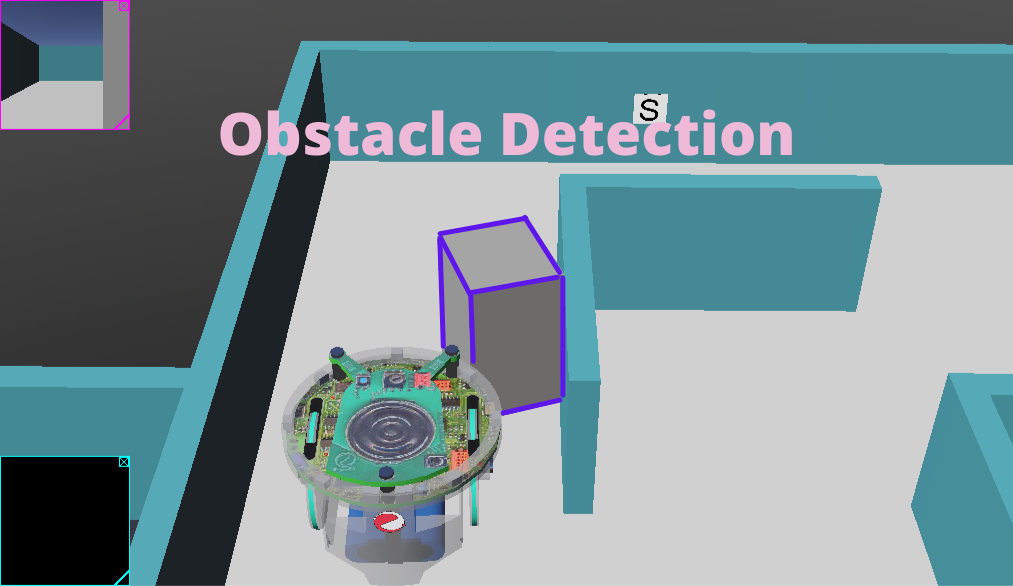
Obstacle detection is huge part of the RCJ Rescue Demo competition. During the RoboCup Rescue Simulation Demonstration Competition, one of the viewers asked TFA Team 309 how they detected an obstacle.
This is a very good question, as our team had trouble with this as well.
At first, we tried using different sensors at the front, but we ended up not having them aligned with different GPS values.
Therefore, we solved this issue by using the last tile’s x and y position, and determining if we had/had not met the next target position.
This is another example of the usefulness of a GPS sensor, something that we are not privileged to have in a regular in-person competition.
