
Predicting the ball's location
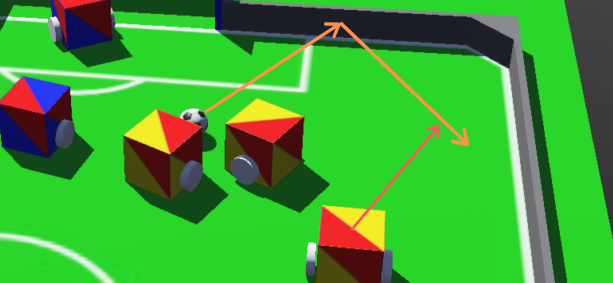
An important part of the RoboCup Junior Soccer Simulation Demo Competition is the ball prediction. Our team used an algorithm involving finding the next x and y locations. We also found that Webot’s has deceleration when the ball hits a wall. This makes sense, as the ball is transferring force into the wall, and the speed decreases.
We look at the change in the x and y values, and determine where the ball will be in an x number of timesteps. This x number of timesteps can be altered according to the distance of the robot to the actual ball location.
By predicting the ball’s position, we are able to meet the ball faster, without spending time chasing the ball.