In the RCJ Soccer Simulation world, communication is an essential part of working together and winning in the competition. Without a good communication algorithm or network, robots could be prone to being by themselves, knocking each other over, or duplicating on roles.
Therefore, the communication issue is one that TFA Junior Robotics team has taken very seriously.
One way that TFA thought they could manage communication was through the emitter/receiver devices that are embedded on the world. However, after careful inspection of the world files and provided supervisors, our team decided that this would not be possible.
The second way that TFA thought of managing the communication problem was through creating a server that could be connected to all the robots. However, due to the uncertainty of success, along with the uncertainty of rule permitted, our team also decided to forgo this idea.
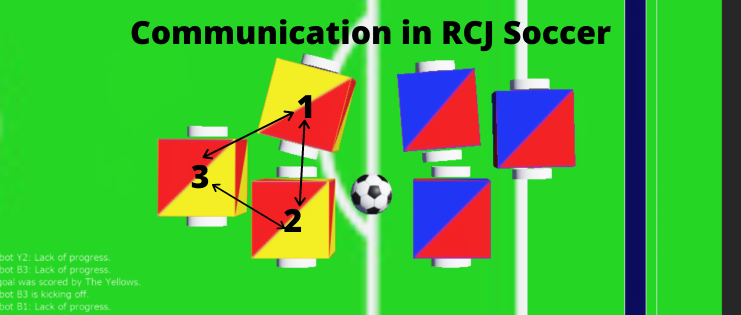
This lead to our current idea, which is to not have robot to robot communication. Instead, our team decided to simply use the same code in each robot. By putting the same code in each robot, we ensure that they are all running using the same algorithm. This makes it easy to assign roles specific to the distances calculated through the GPS values.
Some of the things that each robot communicates with each other are: the distances to the ball, the distances to each other, the distances to the goal, and the distances to the center. These distances help our team decide whether to assign one or another role to each robot.
As you can see in this video, the distances provided by the GPS values create a unified and cohesive attack and defence for both sides. The provided GPS values are essentially a replacement for a communication system.