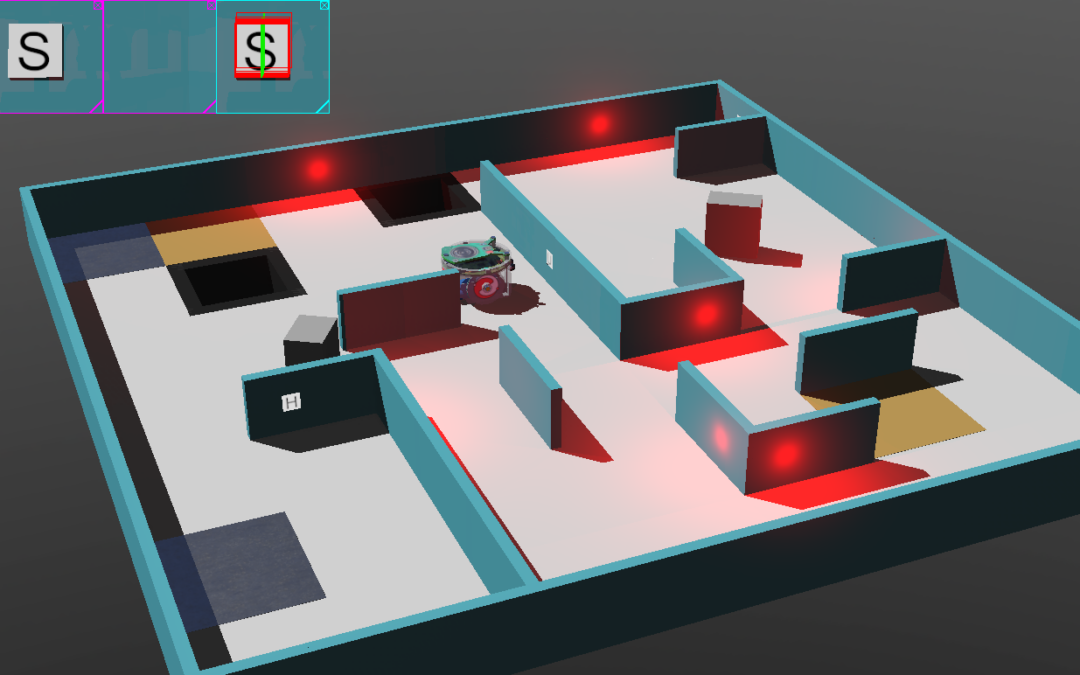
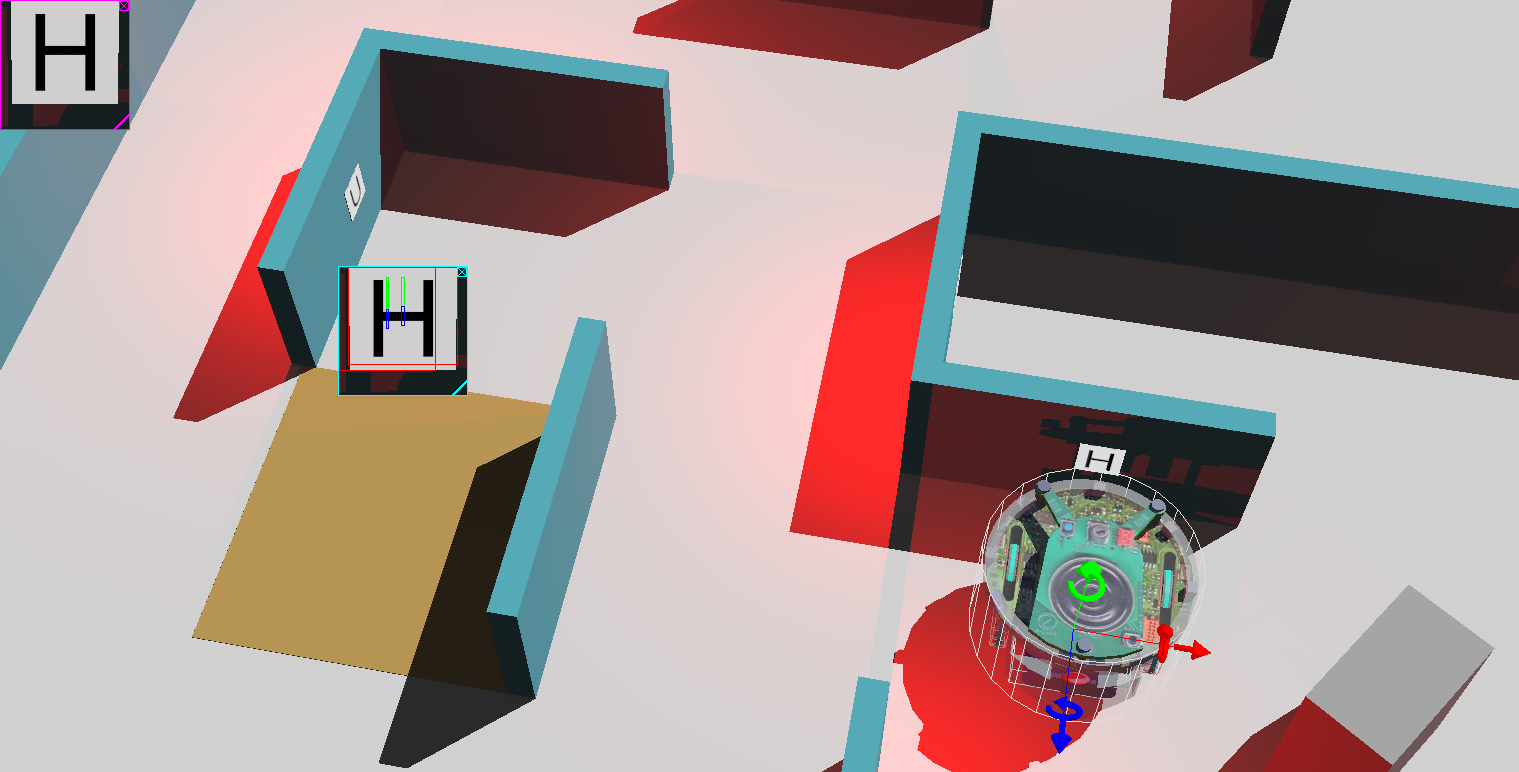
In the RoboCup Rescue Simulation Demo Competition, a reliable visual victim finding algorithm is crucial for success. Each successful victim identification can be worth 40 points, which can add up to be the difference between first and second. Our victim identification algorithm was created through OpenCV, by designing an algorithm capable of differentiating between H, S, and U. We looked at the key points in each letter, and from there, looked to differentiate each key point from each letter from one another.
After preprocessing, the first step in this process was looking at the middle to top pixel area, and determining the number of contours in this region. If the number of contours was greater than or equal to 3, then we could already say that this is an S. If the crop is 0, then we can say that this is a U. We continued differentiating key points until we were left with a letter as a result.
This algorithm process can be seen through the decision tree below:

By being able to test our program through the display function, we were able to determine whether or not our algorithm works. We were able to easily fix any issues, and perform with higher accuracy.

