


Communication in the RCJ Soccer Simulation Communication
In the RCJ Soccer Simulation world, communication is an essential part of working together and winning in the competition. Without a good communication algorithm or network, robots could be prone to being by themselves, knocking each other over, or duplicating on...

RoboCup Junior Soccer Simulation Robot Wheels Falling Off
While testing with Webot's simulation soccer, we found that the wheels could fall off. This happens almost always with the demo player provided, and with robots that don't have good movement control. We have found that this is one of the main problems that may occur...

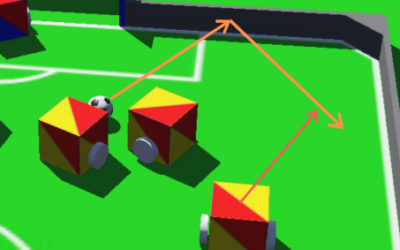
Ball Prediction Along a Corner
In RCJ Soccer Simulation, the corner is a triangle that can change the angle of the ball moving. In a normal ball prediction algorithm, the ball will reflect along the x and y wall. However, along a corner, the ball does not reflect along this wall, but rather at a...
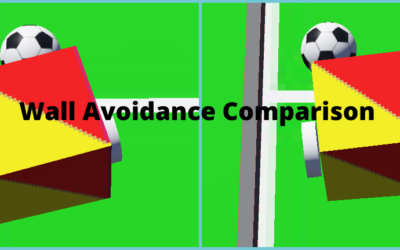
Robot Moving Without Hitting Walls
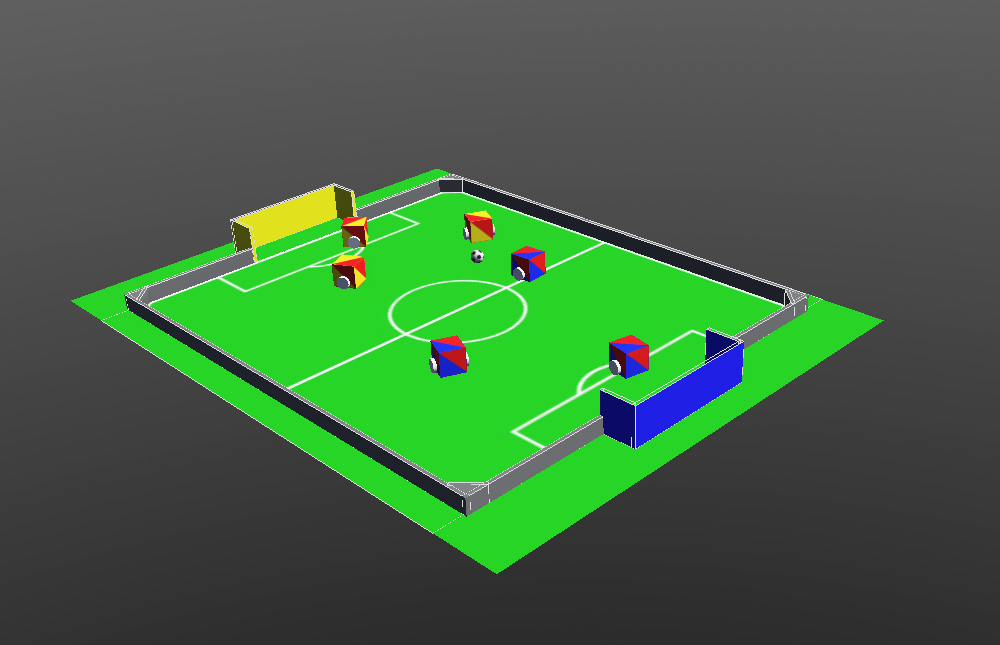
In the RCJ Soccer Simulation Demonstration Competition, there are walls that can slow robots down. These walls can result in a robot getting stuck, and ultimately losing control. It is essential that our team avoid these circumstances.Robot without wall avoidance In...

We gave up Machine Learning in RCJ Soccer Simulation Demo
In the RoboCup Junior Soccer Simulation Competition, our team considered using Machine Learning and/or Reinforcement Learning in our algorithm. However, there were some challenges that we considered: Time constraints Whether we could implement it Learning new concepts...
Soccer Simulation Ball Prediction
An important part of the RoboCup Junior Soccer Simulation Demo Competition is the ball prediction. Our team used an algorithm involving finding the next x and y locations. We also found that Webot's has deceleration when the ball hits a wall. This makes sense, as the...