

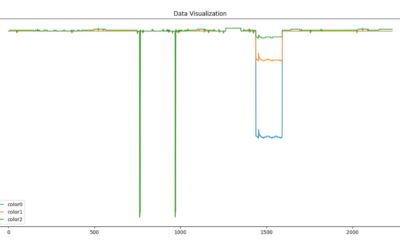
Data Visualization in Webots world for RCJ Rescue Simulation
Creating a robust and reliable robot is an important part of the RoboCup Rescue Simulation Demonstration Competition. When testing in Webots, our team used Data Visualization to determine how/when errors occurred. Each time we tested our robot, we wrote data from...
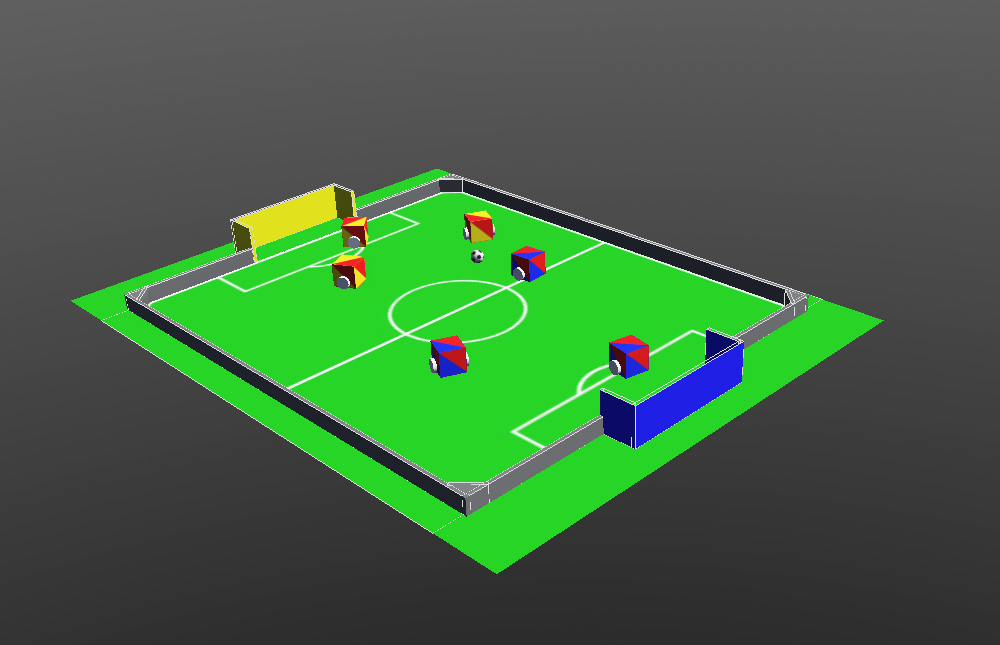
RCJ Rescue Simulation Noise Researching
During the RoboCup Junior Rescue Simulation Demonstration Competition, our team performed many tests, one of which was to find noise. David from our team, developed many worlds for us to test. We then performed Data Visualization on the data, to find unique aspects or...
Test Mapping Without Running a Robot
Mapping is an important feature in the RoboCup Junior Rescue Maze League. It can help the team to earn more points by searching areas where the robot has not been to before. Additionally, with mapping, the robot can return to its starting tile and earn the Successful...
Generating a Webots Controller Window for RCJ Rescue Simulation
Our team faced a challenge when beginning to use the Webots simulation world for the RCJ Rescue Demonstration Simulation Competition. Some of the releases resulted in a world that had no automatic controller to view. As seen on the photos on the left, we found a...