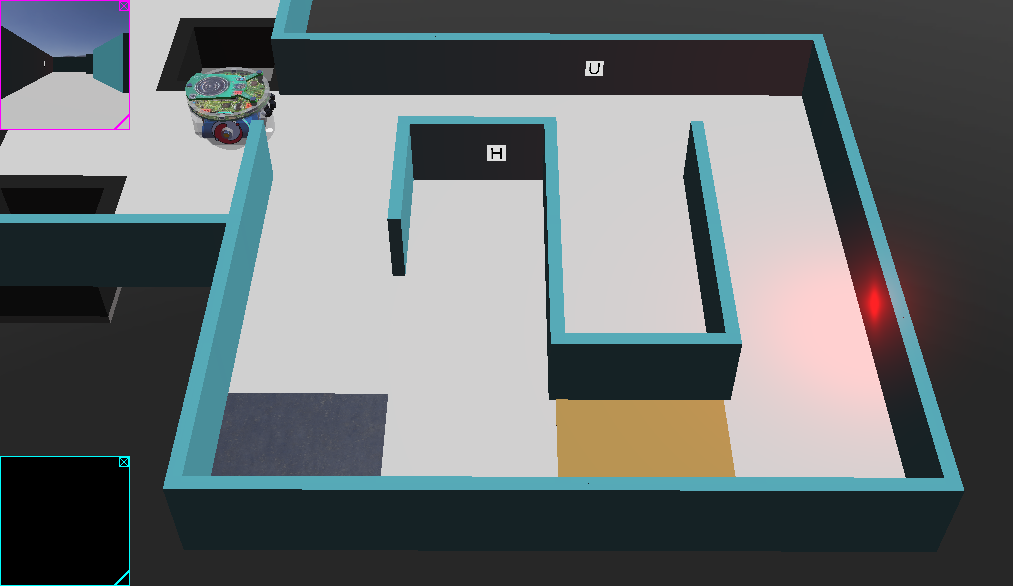
During the RoboCup Junior Rescue Simulation Demonstration Competition, our team performed many tests, one of which was to find noise. David from our team, developed many worlds for us to test. We then performed Data Visualization on the data, to find unique aspects or occurrences. During our research, we found that the noise in the Webots Simulation Platform is very limited. We sometimes however, got errors such as “World Timestep Errors”, which we could not find reasons for. However, we found that the probability of this error of occurring spiked when the robot was moving in repetitive motions or volatilely.
Our team tried avoiding these errors by ensuring complete movements, and testing, testing testing.
