
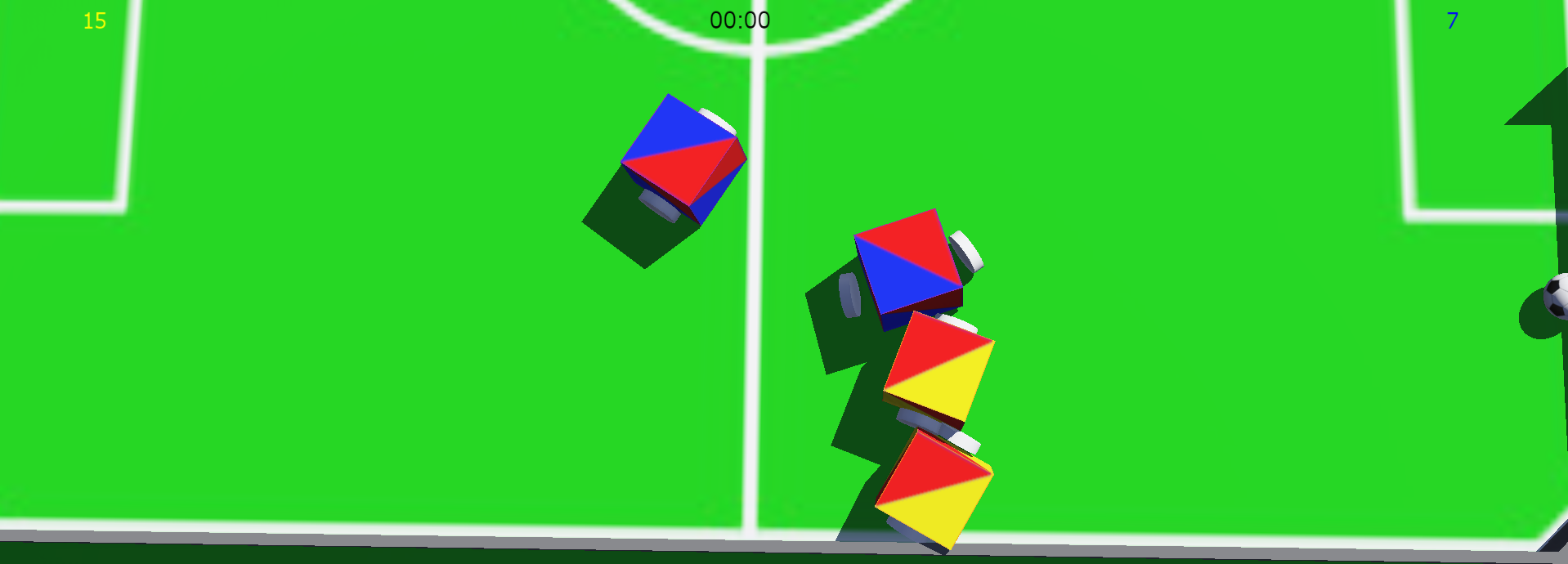
Webot's wheels falling off
While testing with Webot’s simulation soccer, we found that the wheels could fall off. This happens almost always with the demo player provided, and with robots that don’t have good movement control. We have found that this is one of the main problems that may occur in the simulation world, and are keen on avoiding it. Robots can get unplayable when this problem occurs, and can cause a huge problem in a team’s algorithm.
This is not a bug, but rather a good thing, since this shows how real the Webots simulator is.
2 ways that a wheel can fall off:
- When the robot goes from a fast speed to a slow speed
- When the robot is transported
One way of preventing a robot from moving from fast to slow is by creating a dead zone that prevents the motors from going back and forth over a large distance. Another method is in ensuring that the motor speeds never change rapidly by comparing the previous speed with the current speed.
These methods ensure that the motors never have to change speeds rapidly, resulting in wheels falling off.
In the RCJ Soccer Simulation Demonstration rules, a Lack of Progress is defined as when “there is no progress in the gameplay for a reasonable period of time. Typical lack of progress situations are when the ball is stuck between robots, when there is no change in ball and robot’s positions, or when the ball is beyond detection or reach capability of all robots on the field.”
By detecting a lack of progress, a team is able to stop or alter it’s movement to prevent a wheel from moving while being transported.
Another way to prevent wheels from falling off from being transported is by stopping once our robot scores. This is because after a goal is scored, the robots are also relocated.