Ball Handling in the RCJ Soccer World
In the RCJ Soccer Simulation world, TFA Junior Robotics has worked on creating cohesive ball handling strategies.
TFA’s algorithm involves two major parts, the ball prediction, and the directional thinking processes.
In ball prediction, TFA’s algorithm involves a complex ball prediction algorithm, which can be seen in our Ball Prediction post. In this, and the Ball Prediction along corner post, we talked about how we determined the future position of the ball.
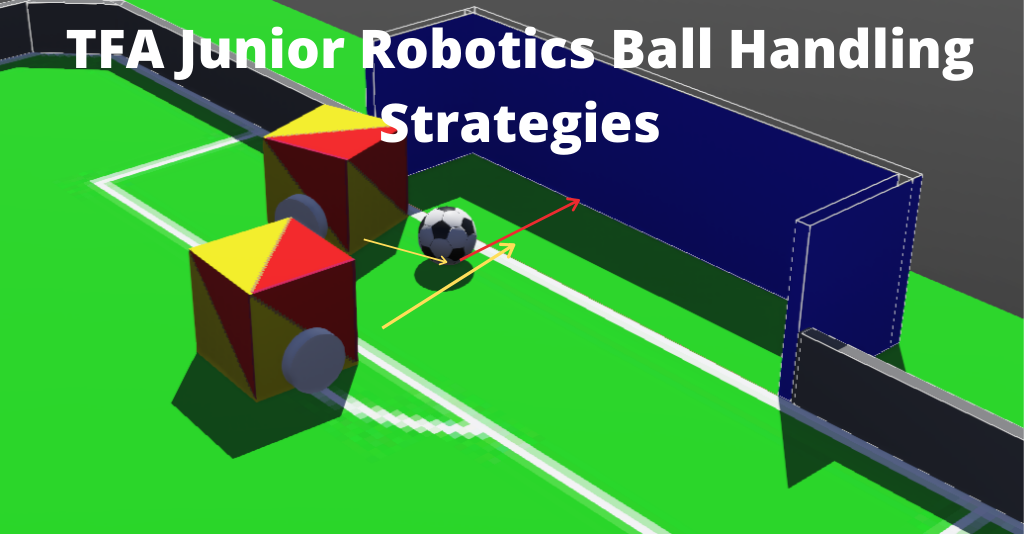
In ball handling, we focused on creating an algorithm that could move the ball from the defending to attacking quickly. Our team developed an algorithm that would chase the ball in an indirect line to the predicted ball position. Instead, our team based our algorithm on a point or distance away from the ball. This resulted in our robots reaching the ball at the predicted point, but also being able control the ball in our intended position. For instance, our robots during the RoboCup Junior Soccer Simulation Demonstration Competition were able to direct the ball at the opponents goal even when defending in our own half.
In the above video, watch us explain how we did ball prediction and ball handling for the RCJ Soccer Simulation Demonstration Competition.
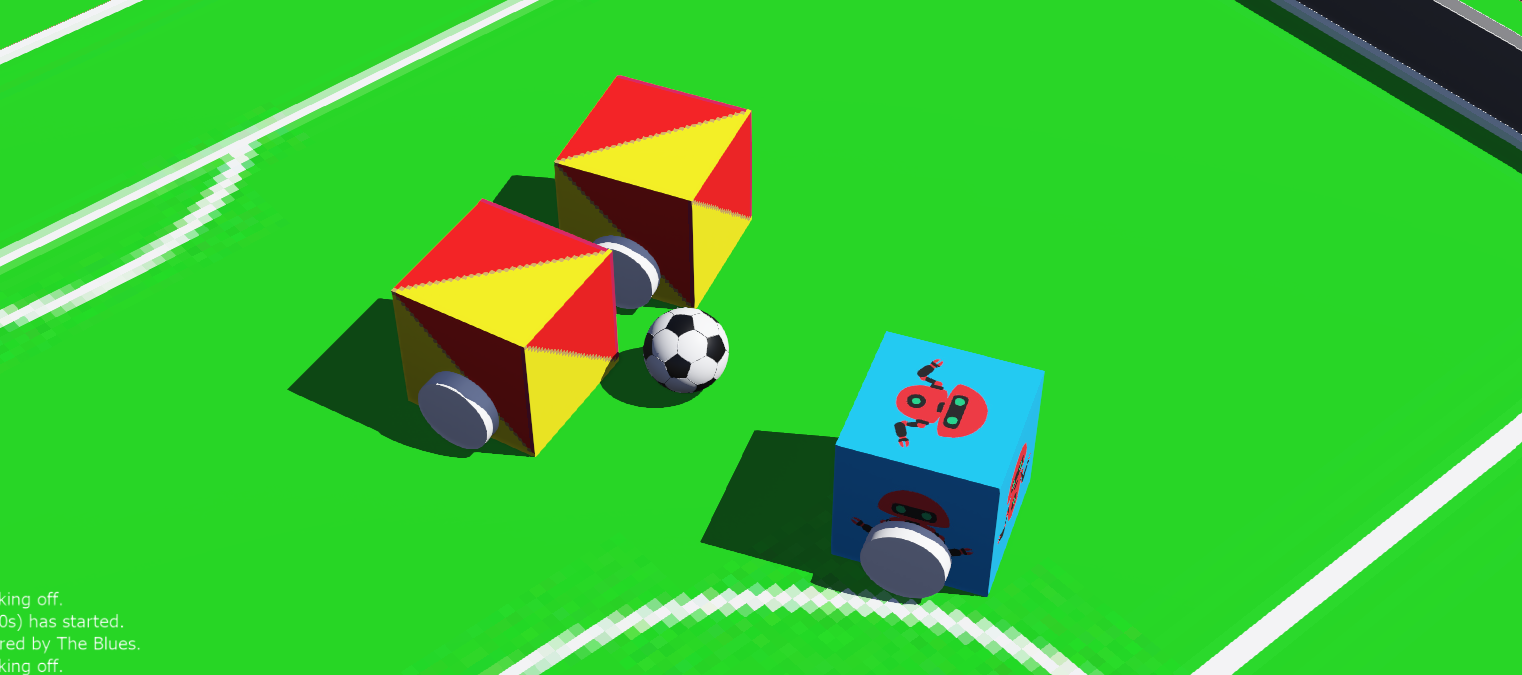
In the RCJ Soccer Simulation Demonstration Competition, TFA 312 finished first out of over 50 international teams!

The above image is a snapshot of the RCJ Soccer Simulation Final Match between TFA Robotics team TFA 312 and SESI Robotics School Makers. TFA 312 went on to win the match 18 to 4.