Updates

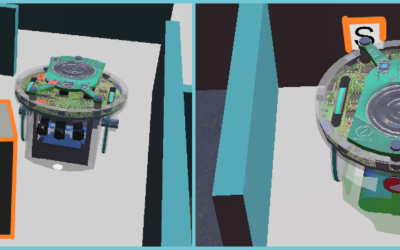
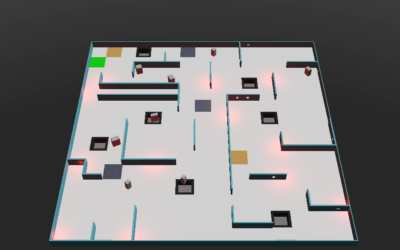
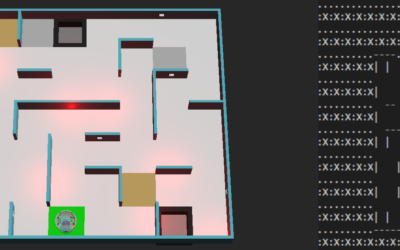
Heated Victim Detection using Vision in RCJ Maze Simulation
Heated victim detection is one of the things that the TFA Junior Robotics Team intends to explore following the 2020 RCJ Rescue Demonstration Competition. The team had previously used vision to...
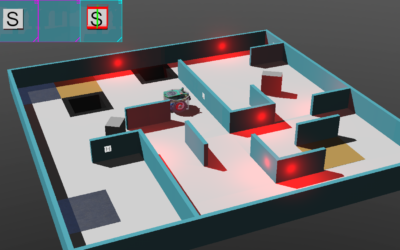
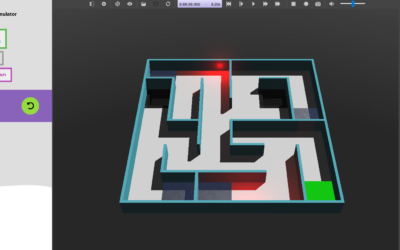
Future Image Processing in the RoboCup Junior Maze Simulation World
After competing in the RoboCup Junior Rescue Simulation Demonstration Competition in 2020, the TFA Junior Robotics Team realized that there were still many improvements to be made going forward. The...
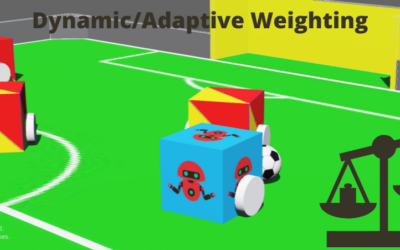
Dynamic Weighted Algorithms in RoboCup Junior Simulation Soccer
Dynamically Weighted algorithms may be one of the future steps that TFA Junior Robotics Team takes in the upcoming June 2021 RCJ Competition. This idea involves having numerous different strategies,...
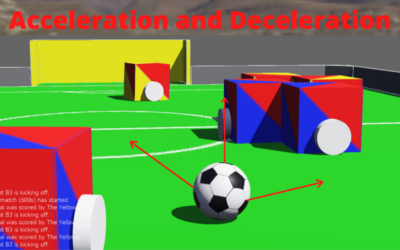
Ball Acceleration & Deceleration in RCJ Soccer Simulation
In the RoboCup Soccer Simulation World, ball acceleration and deceleration are two topics that the TFA Junior Robotics Team looked into. Ball acceleration and deceleration can affect the entire ball...
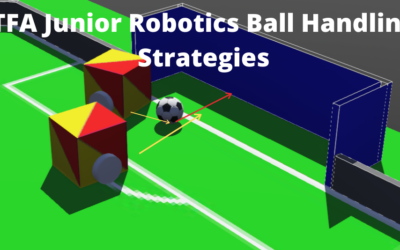
TFA Junior Robotics Ball Handling Strategies
In the RCJ Soccer Simulation world, TFA Junior Robotics has worked on creating cohesive ball handling strategies. TFA's algorithm involves two major parts, the ball prediction, and the directional...

RoboCup Junior Soccer Simulation Demonstration Competition Ends with TFA 312 Finishing First
Our team, TFA 312, finished first at the 2021 RoboCup Junior Soccer Simulation Demonstration Competition. We would like to congratulate the other teams on their performances, and look forward to the...

Communication in the RCJ Soccer Simulation Communication
In the RCJ Soccer Simulation world, communication is an essential part of working together and winning in the competition. Without a good communication algorithm or network, robots could be prone to...

RoboCup Junior Soccer Simulation Robot Wheels Falling Off
While testing with Webot's simulation soccer, we found that the wheels could fall off. This happens almost always with the demo player provided, and with robots that don't have good movement...

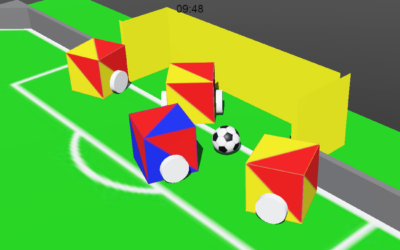
Ball Prediction Along a Corner
In RCJ Soccer Simulation, the corner is a triangle that can change the angle of the ball moving. In a normal ball prediction algorithm, the ball will reflect along the x and y wall. However, along a...
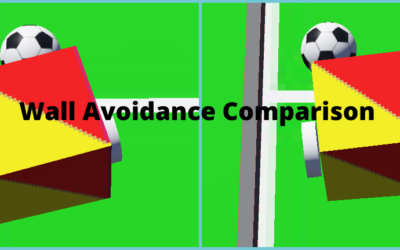
Robot Moving Without Hitting Walls
In the RCJ Soccer Simulation Demonstration Competition, there are walls that can slow robots down. These walls can result in a robot getting stuck, and ultimately losing control. It is essential...

We gave up Machine Learning in RCJ Soccer Simulation Demo
In the RoboCup Junior Soccer Simulation Competition, our team considered using Machine Learning and/or Reinforcement Learning in our algorithm. However, there were some challenges that we...
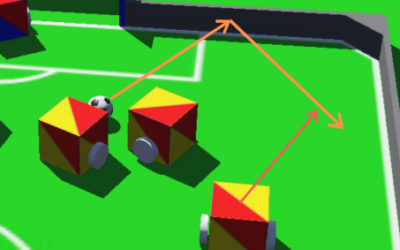
Soccer Simulation Ball Prediction
An important part of the RoboCup Junior Soccer Simulation Demo Competition is the ball prediction. Our team used an algorithm involving finding the next x and y locations. We also found that Webot's...

Designing a Dummy Goalie for Testing in RCJ Soccer
One of the important features of testing offence programs in the RoboCup Soccer Simulation Demonstration Competition is having an opposing team that can defend. This makes it essential to have a...

Converting Webots Image to BMP Image
Image processing is an important part of the Webots simulation world. During the RoboCup Demonstration Rescue Competition, our team designed a Victim Detection Algorithm using OpenCV. In the past...
New Soccer Simulation Competition!
The TFA Junior Robotics Team is excited to announce our latest competition. We will be competing in RoboCup Soccer Simulation Demonstration Competition 2021. This competition will be held on Webots,...
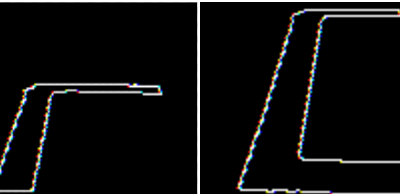
Contour Tracing Algorithm through C and BMP files
During RoboCup Rescue Line and Maze, our team had done Computer Vision contour tracing using OpenCV's findContours function. In the past month, Victor has focused on writing image processing code in...
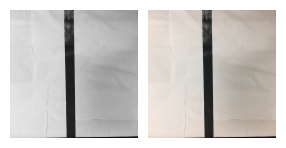
Basic BMP Image Processing
This past month, Victor has worked on basic image processing techniques using the C programming language. This is because our team wanted to see if we could potentially implement image processing...
Accurate Decimal/Big Number Subtraction using C
After solving decimal/big number addition, our team moved on to try to accurately subtract decimals without any errors. Our first thoughts were to simply change the addition sign to a subtraction...
Accurate Decimal/Big Number Addition using C
Decimal calculations can be inaccurate on most computers. When adding float or double type numbers, there can be some unwanted digits in the results. (example on the left) Our team designed...
Testing our RoboCup Rescue Demonstration Simulation Code
A huge part of building a reliable RoboCup Rescue Demonstration Simulation Competition robot is testing. David from our team played a huge part in this, as he designed different tests for our robot...

RCJ Rescue Simulation Demonstration Competition Ends with TFA 309 Finishing First
Our team, TFA 309, finished first at 2020 RoboCup Junior Rescue Simulation Demonstration Competition last week. We would like to congratulate the other teams on their performances, and look forward...

Avoiding obstacles in Webot’s Rescue Simulation
Obstacle detection is huge part of the RCJ Rescue Demo competition. During the RoboCup Rescue Simulation Demonstration Competition, one of the viewers asked TFA Team 309 how they detected an...
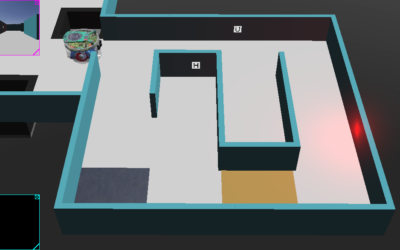
Making a reliable Computer Vision Letter Detection Algorithm
In the RoboCup Rescue Simulation Demo Competition, a reliable visual victim finding algorithm is crucial for success. Each successful victim identification can be worth 40 points, which can add up...

Testing Image Processing Algorithms in a Webots World
In the 2020 RoboCup Junior Simulation Demonstration Competition, one of the objectives is to differentiate between letters using Computer Vision. A correct identification gains bonus points, and...
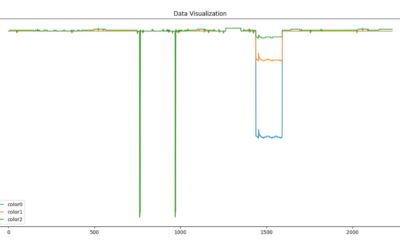
Data Visualization in Webots world for RCJ Rescue Simulation
Creating a robust and reliable robot is an important part of the RoboCup Rescue Simulation Demonstration Competition. When testing in Webots, our team used Data Visualization to determine how/when...
RCJ Rescue Simulation Noise Researching
During the RoboCup Junior Rescue Simulation Demonstration Competition, our team performed many tests, one of which was to find noise. David from our team, developed many worlds for us to test. We...
Test Mapping Without Running a Robot
Mapping is an important feature in the RoboCup Junior Rescue Maze League. It can help the team to earn more points by searching areas where the robot has not been to before. Additionally, with...
Generating a Webots Controller Window for RCJ Rescue Simulation
Our team faced a challenge when beginning to use the Webots simulation world for the RCJ Rescue Demonstration Simulation Competition. Some of the releases resulted in a world that had no automatic...